The LOFT Project
LOFT (Loose Fit Clamp Technique for Assembly of Large Space Structures) is an ESA-funded project led by the Satellite Applications Catapult, in collaboration with Foster + Partners, Technische Universität München (TUM), TU Wien, and space architecture expert David Nixon.
The Challenge
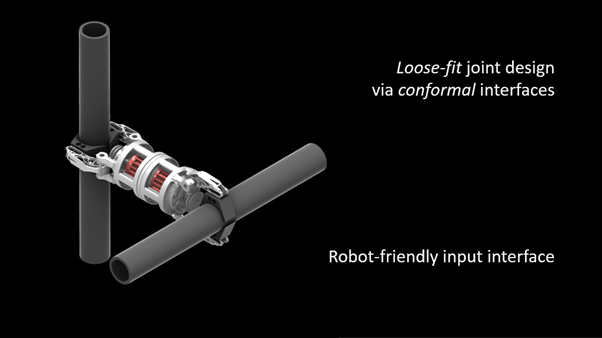
As technology advances, future space missions become more complex and therefore require larger structures than can be sent from Earth in a single piece. The LOFT Project is exploring how we can utilise robotics for in-orbit assembly of modular structures, enabling these structures to be built in space.
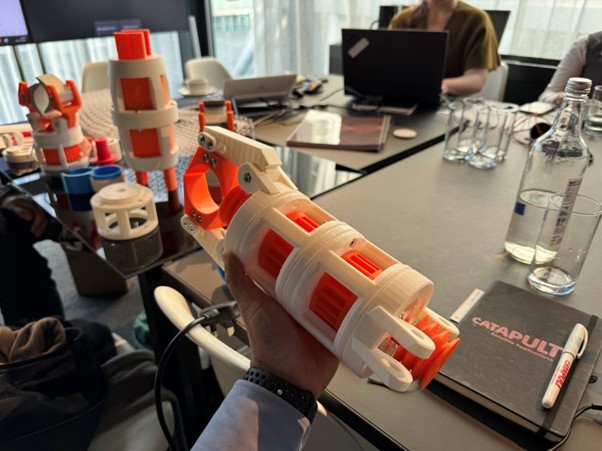
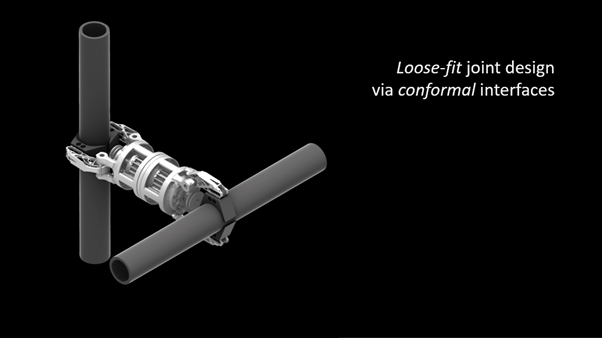
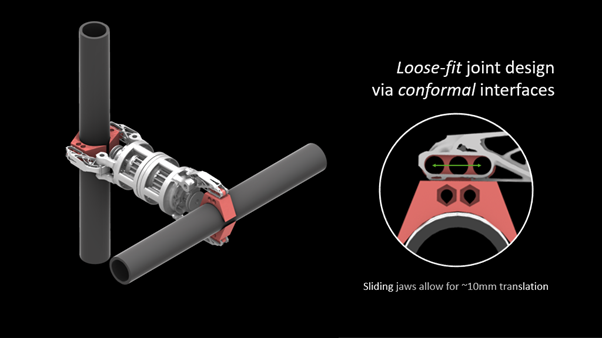
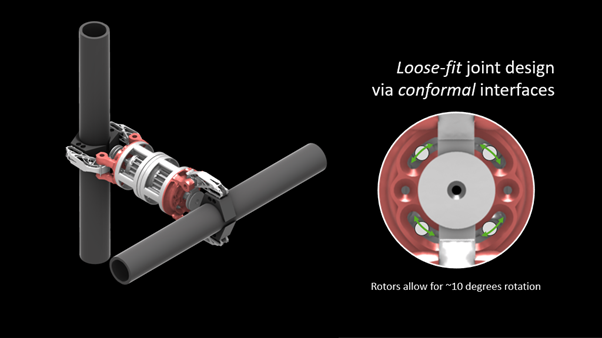
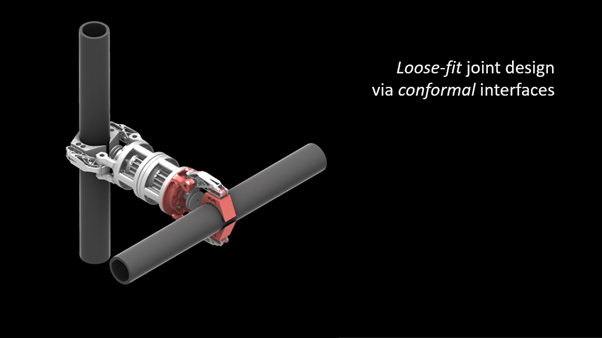
Working together with the consortium, the challenge is to design and produce different parts that, through a loose fit strategy, can tolerate positional and rotational inaccuracies, thereby enhancing fault tolerance and scalability in autonomous assembly.
The Solution
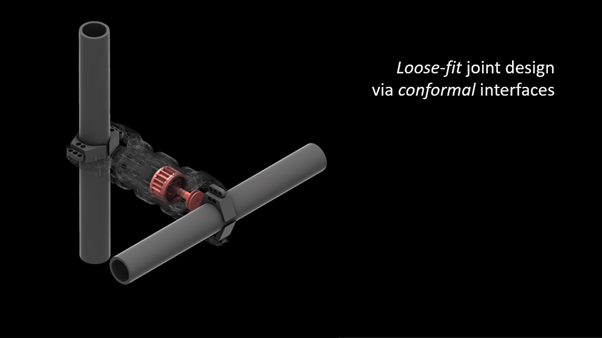
The project aims to develop a novel modular assembly system for large space structures using self-closing, self-locking joints that enable robotic construction with high geometric flexibility. The system is designed to be scalable, reconfigurable, and tolerant to misalignment, making it ideal for future space habitats, solar power platforms, and scientific infrastructure. Through a series of design, simulation, fabrication, and testing phases, LOFT will advance the technology from TRL 2 to TRL 4, culminating in a laboratory-based demonstration of feasibility and performance.
Progression
Find out more:
Contact us to find out more about the project and how you can collaborate with us.