
Beyond Earth: Rendezvous Proximity Operations and Docking – Concept of Operations
As space activity grows, so does the need to manage orbital debris and ensure sustainable operations. The rapid growth of satellites and the accumulation of...
The Big Shift: Space exploration is moving from “single-use” satellites to reusable, in-orbit infrastructure.
The Hidden Threat: In zero gravity, liquid fuel can oscillate inside of the tank. When a spacecraft moves, this “fuel slosh” creates unexpected internal forces.
The Danger: If the navigation software isn’t “slosh-aware,” fluid shifts can cause a spacecraft to move or tumble during docking manoeuvres.
The Solution: Next-gen flight computers are using Model Predictive Control (MPC) software that predicts fluid motion and fires thrusters to cancel out the movement before it happens.
The Breakthrough: A UK-Australia team (Satellite Applications Catapult, Space Machines Company, and the University of Sydney) successfully paired robotics with digital fluid simulations to solve this problem.
What’s Next: These predictive fluid models will be validated in deep space using live flight data from the upcoming MAITRI mission.
The next decade of space exploration will not be defined by where we go, but by what we can do once we are there. In-orbit Servicing, Assembly, and Manufacturing (ISAM) is shifting the paradigm from “single-use” satellites to a sustainable, circular orbital infrastructure.
But as spacecraft transition from disposable assets into upgradeable, reconfigurable platforms, a hidden challenge is bubbling up. It is a complex physics problem that has plagued rocket scientists since the 1960s: propellant sloshing.
In a microgravity environment, fuel does not sit at the bottom of a tank; surface tension and capillary effects dominate over gravity and viscosity. Liquids cling to walls, form bubbles, and more importantly when moved, create inertial forces within the tank and spacecraft.
For a servicing vehicle attempting a centimetre-perfect docking manoeuvre, fluid movement is far from a mere nuisance. If the sloshing frequency matches the natural frequency of the spacecraft’s control system, it can trigger a dangerous feedback loop. This chaotic force can overwhelm navigation systems, potentially causing mission failure or collision during docking.
A joint project by the Satellite Applications Catapult (UK), Space Machines Company (AUS), and the University of Sydney, funded by the UK Space Agency’s International Bilateral Fund has tackled this problem head-on. By combining physical testing and digital fluid modelling, the team is making future space logistics safer, cheaper, and commercially viable.
Historically, most spacecraft use up their fuel during launch and orbit insertion minimising the effect of sloshing in-orbit. However, modern ISAM concepts require spacecraft to manage fluctuating levels of fuel in their tanks whilst undergoing docking, berthing, or structural reconfiguration.
In microgravity, fluid behaviour is dominated by surface tension, wetting, and container geometry rather than hydrostatic pressure as it is on Earth. During manoeuvres or disturbances, even small accelerations or decelerations can mobilise large fluid masses which can alter the spacecraft’s centre of mass (CoM).
As a result, the primary challenge of understanding and mitigating sloshing during ISAM operations is the decoupling of the spacecraft’s centre of mass to these ‘waves’ of fluid movement in the spacecraft’s navigation systems.
In traditional missions, spacecraft navigation systems assume a rigid, solid body. In the ISAM era, we are dealing with “flexible” bodies. As the fluid shifts, it creates a delayed torque, a ‘ghost’ force pushing against the spacecraft’s direction of travel. If the navigation system is not “slosh-aware,” it will try to correct a perceived tilt just as the fluid moves back. This could create an unpredictable wobble at the exact moment of robotic contact, with potentially catastrophic results.
Currently, engineers control slosh using passive hardware built into the spacecraft. By optimising tank geometries, adding baffles, specialised vanes and surface‑tension‑driven propellant management devices (PMDs) to help ‘anchor’ fluids.
Baffles and vanes further increase damping and raise natural frequencies but increase mass and manufacturing complexities against operational flexibility. To unlock a true orbital economy, we need a smarter solution.
Some operators are using “slosh aware manoeuvring” strategies featuring trajectories that let fuel movement to dissipate before the next move is made. Unfortunately, this slows down operations, limiting flexibility and high-energy trajectories.
Recent approaches have moved towards Model Predictive Control (MPC). Instead of reacting to a disturbance, the next generation of spacecraft must predict it.
By embedding fluid-pendulum models directly into the flight software, the spacecraft can anticipate the slosh. If the computer knows that a two-second thruster burn will cause the fuel to hit the tank wall with a specific force exactly 0.5 seconds later, it can pre-emptively fire opposing thrusters to cancel the motion.
To teach software how to anticipate fuel slosh and build models for predictive control, we need real world data to bridge the gap between computer simulations and physical reality.
While space is the ultimate laboratory, Satellite Applications Catapult, Space Machines Company, and the University of Sydney have developed a technique to bridge the gap between digital CFD (Computational Fluid Dynamics) models and physical reality, enhancing the capability of model predictive control to mitigate against sloshing.
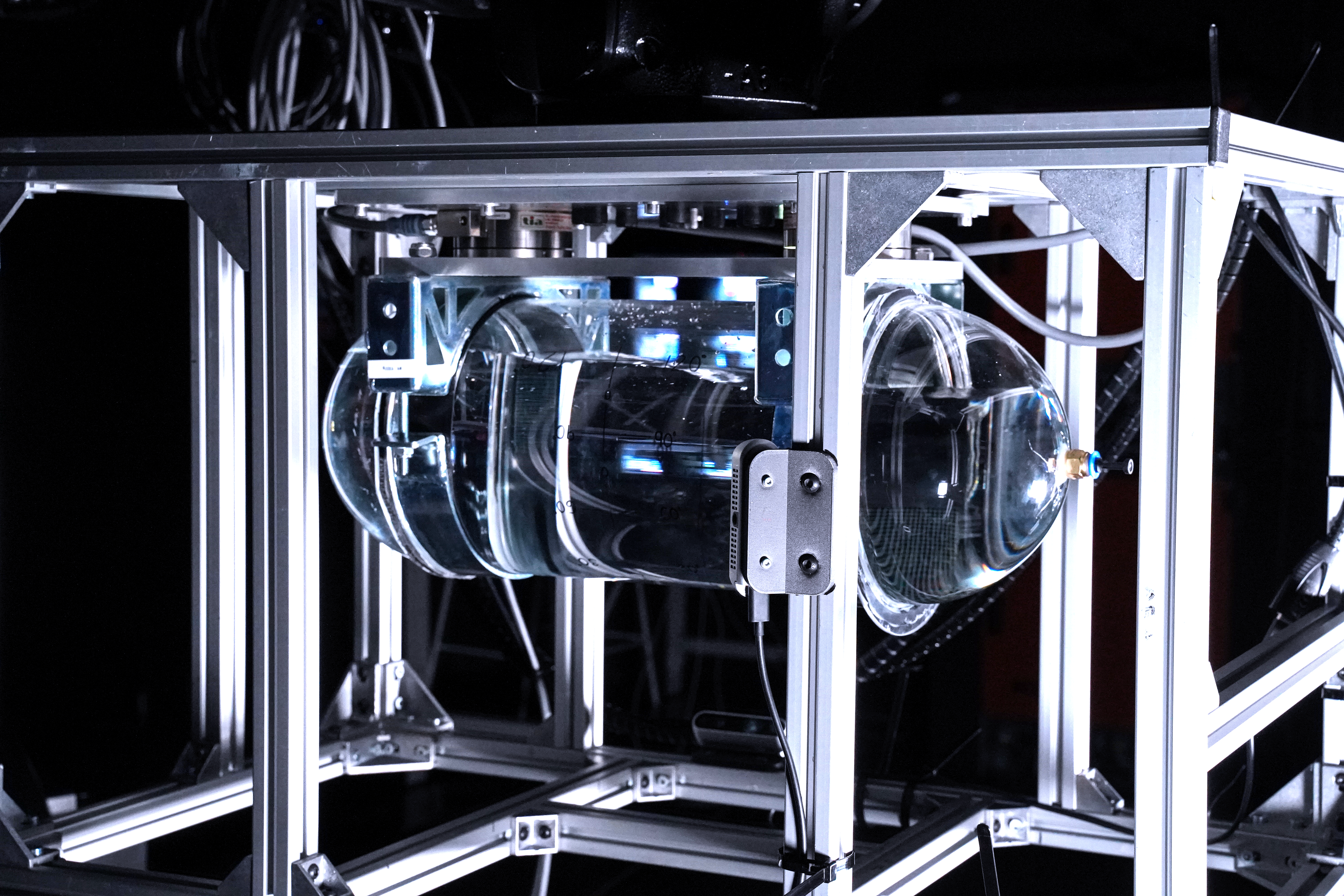
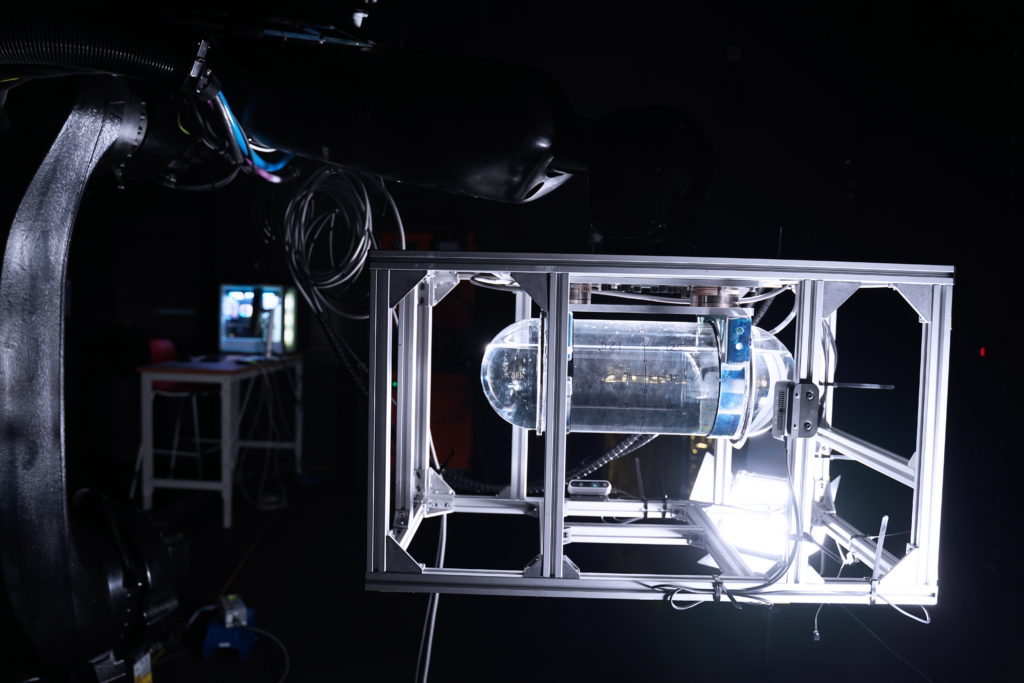
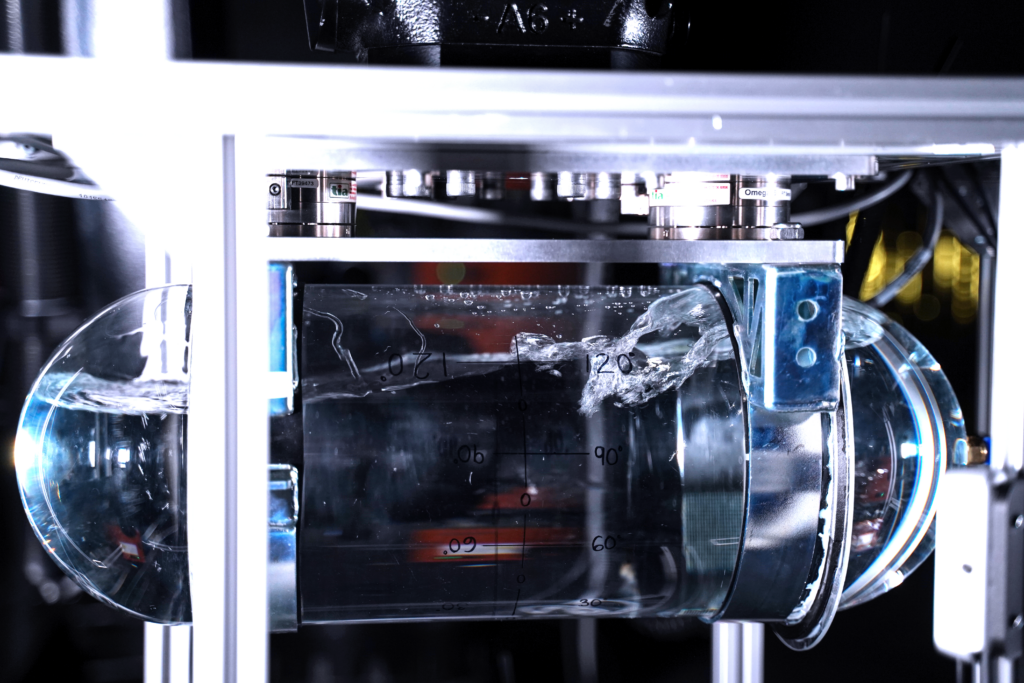
In the Satellite Applications Catapult’s ISAM Facility, clear fuel tanks and pressurized carbon dioxide vessels were mounted separately onto high-tech, six-degree-of-freedom robotic arms. This hardware-in-the-loop setup simulated true orbital motion, capturing the force, pressure, and weight shifts of the moving liquid.
Simultaneously, researchers at the University of Sydney built advanced digital fluid simulations aligning them to the robotic laboratory data. The combined results yielded three major insights:
These trials proved that interpretable slosh models are already mature enough to design and optimise in-orbit trajectories. Now the partners are ready to validate these models using data captured from Space Machines Company’s upcoming MAITRI mission.
The ultimate winners of the commercial space race will not just be the ones with the best robotic arms, fuel delivery systems, or assembly tools. They will be the ones who have combined these with mastery of the internal dynamics of their platforms.
Solving the slosh problem reduces the “fuel penalty” of manoeuvres, extends the lifespan of servicing vehicles, and ensures that the high-stakes dance of orbital docking remains a choreographed ballet rather than a chaotic collision.
As space systems evolve from temporary vehicles, internal fluid dynamics must be treated as a core priority. Integrating predictive slosh control into autonomous spacecraft creates a massive competitive edge, delivering safer operations, lighter fuel tanks and a truly viable orbital economy.

As space activity grows, so does the need to manage orbital debris and ensure sustainable operations. The rapid growth of satellites and the accumulation of...
Sustainability in space is a challenge that requires practical solutions. More launches, space debris, and the environmental cost of repeated satellite replacement are forcing the...