This month the O-RANOS consortium members met at the University of Bristol (UoB) to collaborate and discuss the project, as well as its next steps in deployment to a use case scenario. O-RANOS is the only satellite initiative of the fourteen funded by the UK government’s Future Radio Access Network Competition (FRANC), making it truly a unique prospect for UK digital innovation.

Development over the first course of the project looked at both the functional design methodology and deployment of the two networks, examining the use of implementing satellite technology into the Open RAN ecosystem. Deployed were both the Low-Earth Orbit (LEO) and Geosynchronous Earth orbit (GEO) satellite links, as well as leased line services for the backhaul communication between the University of Bristol and The Satellite Applications Catapult. These satellite links have been deployed at the Future Networks Development Centre in rural Westcott and in urbanised environments in Bristol.


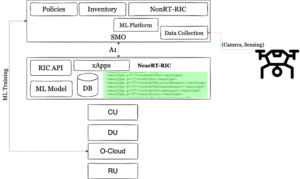
Testing analysis was presented of the SATCOM networks providing insight into the capability of the links. To control and optimise Open Radio Access Network (O-RAN) functions, a software-defined component known as a RAN Intelligent Controller (RIC) is required. RICs are central to O-RAN architecture and enable multivendor interoperability, intelligence, and programmability to radio access networks. Within the production testbed environment, a backhaul multiplexer will coordinate through one or more xApps that the RIC will host. UoB presented the capability to implement novel machine learning capability on server management through a ‘Cell-Stack’ orchestration system. The RIC-to-RIC Ix interface provides interoperability, real time data exchange, bidirectional communication as well as security through access token authorisation. The research and development conducted provides enablement of easy xApp integration occurring through the UoB’s Python library creation “oranos-ix-client”, with UoB looking to contribute their code to the O-RAN specification.
How do rApps and xApps differ?
RIC applications are broken down into xApps and rApps. These are automation tools for the network. RIC applications have been designed to provide optimisation of the networks operational efficiency; through utilisation of both Machine Learning (ML) and other developed algorithms. The difference between these automation tools is in their positioning within the O-RAN architecture as well as the requirements they oppose to latency. The inference of a ML model in production can be used by both xApps and rApps, however from an architecture perspective training of ML models should be disparate. These latency requirements are defined as control events which limit operations for NonRT-RIC up to 1 second, and from 1ms to 10ms for NearRT-RIC.
What impact will RIC applications have during implementation?
Operations with the RIC are complex and require high efficiency to interact with the RU (Radio Units). Complexity is increased upon introducing ML inference as after ML model deployment, utilisation of its inference must be monitored prior to its deployment.
The backhaul multiplexer xApp will select the backhaul network based upon real-time measurements and pre-defined policies whilst rApps will automate network functions that require up to 1-second latency. To implement this capability into O-RANOS, the database management system (DBMS) will consider the application RIC specifications (rApp or xApp).
Compared to NonRT-RIC the requirements for xApps and NearRT-RIC are slightly more complicated, this is due to the extremely low latency of 1ms to 10ms as well as the inference of ML models in real-time. ML models will enable one interface for input streams and one for output streams, however the relation to xApps will be one to many. This is because one ML model could provide inference to multiple applications. To this end, rxSDK will implement both ends of the communication to enable applications leveraging the same ML models at the same time. O-RANOS rxSDK implements communication with the E2 interface by collecting data from E2 Nodes via both Service Models (SM) and Application Protocol (AP) via a DBMS and O-RANOS REST API. The Software Development Kit (SDK) will also implement A1 interconnection between rApps and xApps by mapping user id to app id within the DBMS. The Service Management Orchestration (SMO) will be integrating ‘Kubeflow’ commands that will also enable ML model development and deployment.
UAV use case implementation
Currently, UAV applications are restricted by network quality of service (QoS), therefore automated flights often include the risk of communication interruptions resulting in flight crashes. To put this simply an automated UAV flight will have flight instruction sets, however with enhanced capability utilising video, sensory and location information these could be enhanced through ML capability on network architecture that can handle these low latency requests. Through research utilising the implementation stages the project aims to leverage Open RAN RIC capabilities combined with real-time AI models to predict User Equipment (UE) handover failures; taking the necessary steps to maintain high reliability in these critical scenarios.

Through innovation of a ML-based failure prediction model forming a cooperative part of the network the drones operate, ML network-based failure prediction for automated drone flights can be developed. The project will implement and demonstrate this use case. One significant feature required to achieve this capability is the use case must develop an xApp that supports ML model outputs to guide drones around network failures, securing a reliable flight path over multi-domain networks. Through collecting data from the RIC regarding the communication quality of the UE attached to the UAV the solution can help understand and detect early potential network-related issues and rectify them, securing long range UAV flight automation from network related anomalies.
UAVs already cater for observation in critical infrastructure industries, though optimisation on a large scale some of these checks could be enhanced. For instance, large industrial plants are monitored by drones for dangerous leaks or other faults in the infrastructure. UAV’s already cater in basic autonomy in security in ports and large warehouse environments, though leveraging better QoS in the O-RAN high-reliability networking between public and private networks (for UAV applications) could enable innovation in drone products and services for the future.
Through harnessing Wescott facilities including the Future Networks Development Centre and the Drone Test and Development Centre the O-RANOS project will look to demonstrate the use of satellite backhaul for non-latency critical traffic with use case development and testing concluding at the Drone Test and Development Centre (DTDC). The DTDC is Westcott’s unique former operational airfield segregated away from general aviation enabling a safe and suitable vicinity for development testing of new innovative technology. At the Satellite Applications Catapult, we envisage O-RANOS UAV use case demo activities to be conducted in summer 2023!
